Էլեկտրոնային արդյունաբերության ակտիվ զարգացման հետ մեկտեղ, որոշ կառուցվածքային բաղադրիչների դիրքի հայտնաբերումը դանդաղորեն փոխվում է սկզբնական կոնտակտային չափումից մինչև ոչ կոնտակտային չափում.Դահլիճի դիրքի սենսոր և մագնիս. Ինչպե՞ս կարող ենք ընտրել համապատասխան մագնիս՝ ըստ մեր արտադրանքի և կառուցվածքի: Այստեղ մենք մի քանի պարզ վերլուծություն ենք անում.
Նախ, մենք պետք է որոշենք մագնիսի նյութը: Ներկայումս սրահի դիրքի սենսորում լայնորեն օգտագործվում են սամարիումի կոբալտային մագնիսը և նեոդիմում երկաթի բորը: Երկու մագնիսների հիմնական տարբերությունն այն է, որ նույն ծավալի վրա հիմնված NdFeB մագնիսներն ավելի ուժեղ են, քան սամարիումի կոբալտ մագնիսները; սամարիումի կոբալտի ջերմային էքսկուրսիան ավելի փոքր է, քան Nd-Fe-B-ը. Սամարիումի կոբալտի օքսիդացման դիմադրությունն ավելի ուժեղ է, քան Nd-Fe-B-ն, բայց ընդհանուր առմամբ մագնիսի արտաքին մասում կա ծածկույթ, որը կարող է լուծել օքսիդացման խնդիրը. Սամարիումի կոբալտի մագնիսը ունի ավելի լավ ջերմաստիճանային դիմադրություն, քան NdFeB մագնիսը, բայց երկու մագնիսական նյութերի ջերմաստիճանի դիմադրության արժեքը կարող է հասնել ավելի քան 200 ℃: Հետևաբար, մագնիսի տեսակն ընտրելիս մենք պետք է գնահատենք այն ծախսերի կատարման, աշխատանքային ջերմաստիճանի և աշխատանքային միջավայրի հետ միասին: Ընդհանուր առմամբ, NdFeB-ը կարող է ավելի շատ օգտագործվել, հիմնականում այն պատճառով, որ այն ունի մագնիսական դաշտի լավագույն բնութագրերը: Այնուամենայնիվ, ջերմաստիճանի լայն տիրույթում աշխատելիս խորհուրդ է տրվում ընտրել սամարիումի կոբալտ մագնիս՝ իր փոքր ջերմային դրեյֆի պատճառով:
Բացի այդ, մենք պետք է որոշենք մագնիսի որոշ հիմնական պարամետրեր: Ըստ փորձարկման դիրքի տեղեկատվության և օբյեկտի շարժման ուղղության՝ մենք որոշում ենք՝ մագնիսի մագնիսացման ուղղությունը տրամագծային է, թե առանցքային: Բացի այդ, որոշվում է, թե արդյոք ընտրել աքառակուսի մագնիսկամ ագլան մագնիսըստ տեղադրման կառուցվածքի. Իհարկե, երբեմն մենք պետք է հարմարեցնենք մագնիսի ձևը ըստ կառուցվածքի: Մագնիսական հոսքի վերաբերյալ մեկ այլ պահանջ կա, որը միշտ եղել է մեր մտահոգությունը մագնիսի ընտրության հարցում: Փաստորեն, մենք պետք է այն վերլուծենք հետևյալ երկու ասպեկտներով.
1. Մագնիսական դաշտի ուժգնությունը, որն առաջանում է հենց սրահի դիրքի սենսորից և առաջացած մագնիսական դաշտի տիրույթը յուրաքանչյուր ուղղությամբ, հստակ կնշվեն սենսորների տվյալների գրքում:
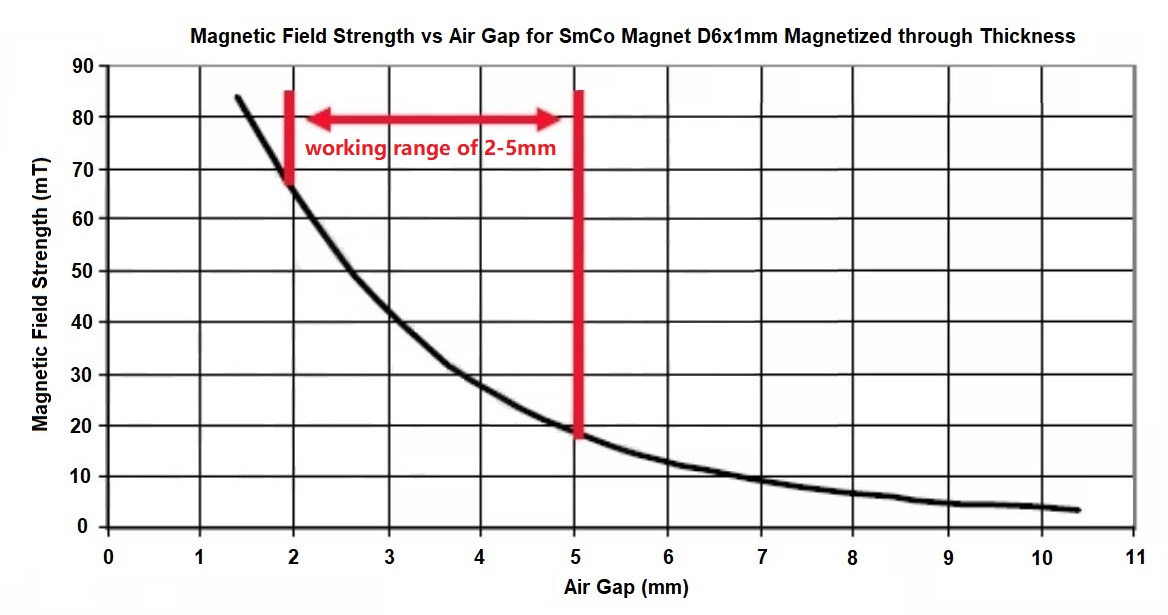
2. Մագնիսի և սենսորի միջև հեռավորությունը հիմնականում որոշվում է արտադրանքի կառուցվածքով: Համաձայն վերը նշված երկու ասպեկտների և ստորև բերված նկարում մագնիսական դաշտի փոփոխության կորի, որպես օրինակ, մենք կարող ենք որոշել անհրաժեշտ մագնիսի մագնիսական դաշտի ուժը:
Ի վերջո, մենք պետք է հասկանանք, որ դա չի նշանակում, որ քանի դեռ մագնիսական դաշտը ընկնում է սենսորի միջակայքի պահանջներին, մագնիսը կարող է նույնքան հեռու լինել սենսորից: Չնայած սենսորն ինքնին ունի տրամաչափման ֆունկցիա, մենք պետք է հասկանանք, որ երբ մագնիսը շատ հեռու է սենսորից, մագնիսական դաշտի բաշխումը ինքնին դժվար է ապահովել գծային կամ մոտ գծայինությանը: Սա նշանակում է, որ դիրքի փոփոխությամբ և բուն մագնիսական դաշտի ոչ գծային բաշխմամբ, սենսորային չափումը կդառնա բարդ, իսկ տրամաչափումը կդառնա շատ բարդ, այնպես որ արտադրանքը չունի կրճատելիություն:
Վերոնշյալը պարզապես մագնիսների ընտրության պարզ վերլուծություն է Hall սենսորային հավելվածներում: Հուսով ենք, որ դա օգտակար կլինի ձեզ համար: Եթե զարգացման գործընթացում այլ հարցեր ունեք, խնդրում ենք կապվել մեզ հետ,Ningbo Horizon Magnetics. Մենք կարող ենք հետագա կապ հաստատել և ձեզ տրամադրել տեխնիկական աջակցություն:
Հրապարակման ժամանակը՝ օգոստոսի 12-2021